完整解析 OpenMind:打造專屬於具身智慧的全球作業系統與信任網路
為什麼需要開放的機器人新時代
在未來 5–8 年,全球機器人數量將突破 10 億台,這將成為它們從「單一展示」邁向「社會分工」的關鍵時刻。機器人將不再只是生產線上的機械手臂,而是能夠感知、理解、決策,並且與人類攜手協作的「同事、老師與夥伴」。
近幾年,機器人硬體如同鍛鍊肌肉般迅速發展,不僅擁有更靈巧的手、更穩健的步態,也有更豐富的感測能力。但真正的門檻並非金屬或馬達本身,而是如何賦予它們能共享與協作的心智:
- 各家廠商軟體互不兼容,導致機器人之間無法共享技能與智慧;
- 決策邏輯被封閉系統鎖死,外界難以驗證或優化;
- 中心化控制架構抑制創新速度,信任成本居高不下。
這種分裂現象,讓機器人產業難以將 AI 模型進展導入可複製的生產力:單機展示層出不窮,卻缺乏跨設備遷移、決策驗證以及標準協作,難以實現規模化。而 OpenMind 要解決的,正是這「最後一哩路」。我們的目標不是打造更會跳舞的機器人,而是要為全球海量異質機器人提供統一的軟體基礎和協作標準:
- 讓機器人具備語境理解與互相學習的能力;
- 讓開發者能在開源、模組化架構上迅速打造應用;
- 讓人與機器在去中心化規則下安全協作與結算。
簡而言之,OpenMind 正在打造機器人的通用作業系統,不僅讓機器人具備感知與行動,更能以去中心化協作,在任何場域安全且規模化地共同運作。
誰支持這條道路:2,000 萬美元融資與全球頂尖陣容
目前,OpenMind 已完成 2,000 萬美元(種子輪+A 輪)融資,由 Pantera Capital 領投,投資名單包含全球一線科技與資本力量:
- 西方科技與資本生態:Ribbit、Coinbase Ventures、DCG、Lightspeed Faction、Anagram、Pi Network Ventures、Topology、Primitive Ventures 及 Amber Group 等,長年深耕加密與 AI 基礎建設,押注「智能體經濟與機器網路」底層範式;
- 東方產業力量:紅杉中國等耕耘機器人供應鏈與製造體系,深知「打造一台機器並量產交付」的複雜度與門檻;
同時,OpenMind 也與 KraneShares 等傳統資本市場參與者密切互動,攜手探索將「機器人+智能體」長期價值納入金融結構化產品的可行路徑,實現幣市與股市雙向貫通。2025 年 6 月,當 KraneShares 推出全球人形與具身智能指數 ETF(KOID)時,選用了 OpenMind 與 RoboStore 聯合打造的人形機器人 “Iris” 於納斯達克敲響開市鐘,這是交易所歷史上首度由人形機器人執行此儀式。
如 Pantera Capital 合夥人 Nihal Maunder 所說:
「如果我們期望智慧機器能在開放環境中運作,就必須打造開放的智慧網路。OpenMind 對機器人業界的貢獻,如同 Linux 之於軟體、以太坊之於區塊鏈。」
團隊與顧問:從實驗室到生產線
OpenMind 創辦人 Jan Liphardt 為史丹佛大學副教授、前柏克萊教授,長年專注於資料與分散式系統領域,結合學術與工程實踐。他主張以開源重用、可稽核追溯機制取代黑箱作業,並以跨領域方式結合 AI、機器人與密碼技術。
OpenMind 的核心團隊成員來自 OKX Ventures、Oxford Robotics Institute、Palantir、Databricks、Perplexity 等單位,涵蓋機器人控制、感知與導航、多模態與 LLM 調度、分散式系統與鏈上協議等重點領域。顧問團隊則由產學專家組成(如 Stanford 機器人計畫 Steve Cousins、牛津區塊鏈中心 Bill Roscoe、Imperial College 安全 AI 教授 Alessio Lomuscio),確保機器人「安全、合規、可靠」發展。
OpenMind 的解法:雙層架構,一套秩序
OpenMind 建構了一套可重用基礎設施,讓機器人能跨設備、跨廠商、甚至跨國協同及資訊互通:
- 設備端:提供面向實體機器人的 AI 原生作業系統 OM1,完整串聯感知到執行,讓不同形態機器皆能認知環境並完成任務;
- 網路端:建立去中心化協作網路 FABRIC,提供身份、任務分配與通訊機制,確保協作時機器人能彼此辨識、任務分配、狀態共享。
這種「作業系統+網路層」組合,讓機器人不僅能獨立行動,更能於統一協作網路中協調流程,完成複雜任務。
OM1:為現實世界打造的 AI 原生作業系統
如同手機需要 iOS 或 Android 執行 App,機器人同樣仰賴作業系統運行 AI 模型、處理感測資料、推論決策並發動行動。
OM1 因應而生,這是面向現實環境的 AI 原生作業系統,使機器人能感知、理解、規劃,並於不同環境自動完成任務。與傳統封閉控制系統不同,OM1 採開放原始碼、模組化,且無硬體依賴(hardware-agnostic),可部署於人形、四足、輪式、機械臂等機型。
四大核心流程:感知到執行
OM1 將機器人智慧分解為四大通用步驟:Perception(感知)→ Memory(記憶)→ Planning(規劃)→ Action(執行)。這流程於 OM1 以模組方式整合,並藉統一資料語言貫穿,構建可組合、可替換、可驗證的智能能力。
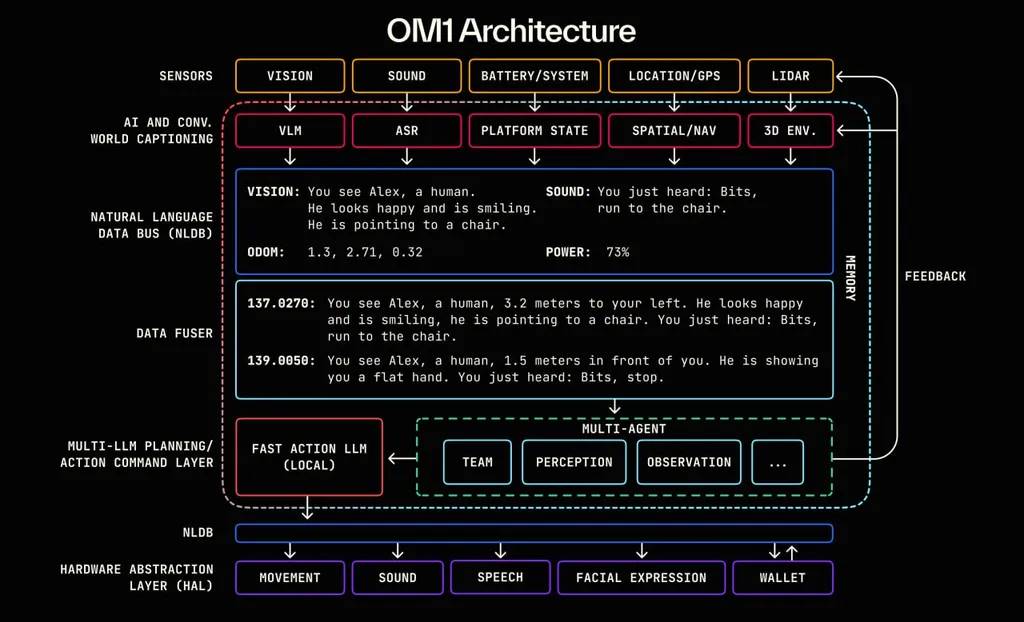
OM1 架構圖
架構上,OM1 七層鏈路包括:
- Sensor Layer(感測器層)情報收集:攝影機、LIDAR、麥克風、電池狀態、GPS 等多模態感知輸入。
- AI + World Captioning Layer(世界理解層)情報翻譯:多模態模型將視覺、語音、狀態轉為自然語言描述(如「你看到一個人在揮手」)。
- Natural Language Data Bus(自然語言總線)情報傳遞:所有感知資料以帶時間戳的語言片段方式在各模組間流通。
- Data Fuser(情境融合層)情報整合:統合多源輸入,產出決策用的完整語境(prompt)。
- Multi-AI Planning/Decision Layer(多智能體規劃層)產生決策:多組 LLM 解析語境,並依鏈上規則產生行動計畫。
- NLDB 下行通道:決策成果透過語言中介層下達硬體執行系統。
- Hardware Abstraction Layer(硬體抽象層)執行行動:語言指令轉換為底層控制指令,驅動硬體動作(移動、語音播報、交易等)。
快速上手,應用多元
要讓創意迅速化為可執行任務,OM1 內建多項工具:
- 技能快速擴增:利用自然語言和大模型,數小時內即可為機器人新增新行為,省去耗時編程。
- 多模態整合:輕鬆組合 LiDAR、影像、聲音等感知模組,開發者免寫複雜感測融合邏輯。
- 內建大模型介面:整合 GPT-4o、DeepSeek、VLMs 等語言/視覺模型,支援語音互動。
- 廣泛軟硬體支援:兼容 ROS2、Cyclone DDS 等主流協議,與現有機器人中介軟體無縫銜接。無論 Unitree G1 人形、Go2 四足或 Turtlebot、機械臂皆可直接串接。
- 整合 FABRIC:OM1 原生支援身份、任務協作與鏈上支付,讓機器人不僅能單機作業,也能全方位參與全球協作網路。
目前 OM1 已導入多種真實應用場景:
- Frenchie(Unitree Go2 四足犬):於 USS Hornet 國防技術展示 2024 執行複雜現場任務。
- Iris(Unitree G1 人形機器人):於 EthDenver 2025 Coinbase 攤位展示人機互動,並計畫透過 RoboStore 教育項目導入美國高校課程。
FABRIC:去中心化人機協作網路
即便機器人大腦再強大,若彼此無法安全、可信協作,終究各自為戰。實務上,不同品牌機器人經常自建體系、資訊難共享,跨品牌甚至跨國協作更乏可信身份及標準規範。於是產生以下挑戰:
- 身份與位置驗證:機器人如何證明自己是誰、位於何處、正執行何任務?
- 技能與資料共享:如何授權機器人共享資料或調用技能?
- 控制權界定:如何設定技能使用頻次、範圍與資料回傳條件?
FABRIC 為解決這些痛點而生。這是 OpenMind 打造的去中心化人機協作網路,統一提供機器人與智慧系統的身份、任務、通訊和結算基礎設施。你可以理解成:
- 像 GPS 一樣,讓機器人知道彼此位置、是否可協作;
- 像 VPN 一樣,機器人可安全直連,無需公開 IP 或複雜網路設置;
- 像任務排程系統一樣,任務自動釋出、接受並全程紀錄。
核心應用情境
FABRIC 可因應多元場域,包括但不限於:
- 遠距操作與監控:可從任何地點安全控制機器人,無須專網。
- Robot-as-a-Service 市場:如同叫車般調用機器人,執行清潔、巡檢、配送等任務。
- 群眾地圖與資料收集:機器人或車隊即時上傳路況、障礙、環境變化,產製高精度共享地圖。
- 即時掃描/測繪:臨時派遣鄰近機器人,完成 3D 建模、建築測繪或保險證據收集。
FABRIC 讓「誰做了什麼、在哪裡、完成程度」都可被驗證與追蹤,也讓技能調用和任務執行界線明確。
長遠而言,FABRIC 將成為機器智慧的 App Store:全球技能授權調用,數據回饋模型,推進協作網路自我進化。
Web3 將「開放」深植機器社會底層
目前機器人產業正趨於集中,少數平台掌控所有硬體、演算法與網路,外部創新難以進入。而去中心化價值在於,不論機器人由何廠製造、部署於哪國,都能於開放網路協作、流通技能、結算報酬,無需依賴單一平台。
OpenMind 利用區塊鏈技術,把協作規則、技能存取權限、報酬分配機制寫成公開、可驗證、可優化的「網路秩序」
- 可驗證身份:每台機器人與操作員都於鏈上註冊唯一身份(ERC-7777 標準),硬體特性、責任範圍、權限級別透明可查。
- 任務公開分派:任務並非黑箱分配,而是在公開規則下發布、競價、撮合;所有協作都產生具時空座標的加密憑證,上鏈存證。
- 自動結算分潤:任務完成後,分潤、保險、保證金自動釋放或扣除,所有參與者皆可即時驗證結果。
- 技能自由流通:新技能可由合約設定調用次數與適用設備,兼顧智財保護與全球技能流通。
這套協作秩序開放所有參與者使用、監督及優化。對 Web3 用戶而言,這意謂著機器人經濟自核⼼即具備去壟斷、可組合、可驗證特質——這不僅是賽道機會,更是將「開放」根植於機器社會底層的一次機遇。
讓具身智能走出孤島
不論在醫院巡房、學校學習新技能、還是城市街道巡檢與建模,機器人正逐步走出「展示台」,成為日常分工不可或缺的一員。它們 24 小時運作,規則有序、兼具記憶與技能,能與人類及其他機器順暢協作。
要讓這些場景真正大規模普及,背後不僅需更聰慧的機器,也要一套能促進信任、互通與協作的底層秩序。OpenMind 已以 OM1 和 FABRIC 建下基礎:OM1 讓機器人能理解世界、主動行動,FABRIC 讓這些能力於全球網路間流通。接下來,就是讓這條路延伸進更多城市與網路,讓機器人成為社會網路中值得信賴的長期夥伴。
OpenMind 的藍圖十分明確:
短期:完成 OM1 核心功能原型及 FABRIC MVP,上線鏈上身份與基礎協作功能;
中期:讓 OM1 與 FABRIC 在教育、家庭、企業場域有效落地,結合早期節點、聚攏開發者社群;
長期:將 OM1 與 FABRIC 打造成全球標準,讓任何機器都能如同接入網際網路般加入這個開放機器協作網路,並帶動全球機器經濟可持續運作。
在 Web2 時代,機器人往往被困於單一廠商封閉體系,功能與數據難以流動;而在 OpenMind 世界,每台機器人都是開放網路的平等節點:可自由加入、學習、協作、結算,與人共構可信互聯的全球機器社會。OpenMind 提供的,就是推動這項大規模變革所需的堅實動能。
聲明:
- 本文轉載自 [TechFlow],著作權歸原作者 [TechFlow] 所有,如對轉載有任何異議,請聯絡 Gate Learn 團隊,我們將依相關流程盡快處理。
- 免責聲明:本文所載觀點及意見僅屬作者個人立場,並不構成任何投資建議。
- 本篇其他語言版本由 Gate Learn 團隊翻譯,未經准許且未註明 Gate ,皆不得轉載、流傳或抄襲本翻譯內容。
相關文章

Solana需要 L2 和應用程式鏈?

Sui:使用者如何利用其速度、安全性和可擴充性?

錯誤的鉻擴展程式竊取分析

在哪種敘事中最受歡迎的掉落?

由幣安實驗室支持的必試專案,提供額外權益質押獎勵(包括分步指南)
